Microphone
The "Scots" that wis uised in this airticle wis written bi a body that haesna a guid grip on the leid. Please mak this airticle mair better gin ye can. |
A microphone (colloquially cried a mic or mike; baith pronoonced /ˈmaɪk/)[1] is an acoustic-tae-electric transducer or sensor that converts soond intae an electrical signal. Microphones are uised in mony applications such as telephones, tape recorders, karaoke seestems, hearin aids, motion pictur production, live an recordit audio ingineerin, FRS radios, megaphones, in radio an televeesion broadcastin an in computers for recordin vyce, speech recogneetion, VoIP, an for non-acoustic purposes such as ultrasonic checkin or knock sensors.

Maist microphones the day uise electromagnetic induction (dynamic microphone), capacitance chynge (condenser microphone), piezoelectric generation, or licht modulation tae produce an electrical voltage signal frae mechanical vibration.
Polar patterns
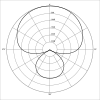
eeditMicrophone polar sensitivity. Microphone is parallel tae the page facin upwarts in ilka diagram.
-

Omnidirectional -

Subcardioid -

-
Supercardioid -

Hypercardioid -

Bi-directional or Figure of 8 -

Lobar







Cardioid, hypercardioid, supercardioid, subcardioid
eeditBi combining th twa components in different ratios, ony pattern atween omni an figure-8 kin be achieved, that comprise the first-order cardioid fowk. Common shapes include:
- A hyper-cardioid microphone is seemlar tae cardioid, but wi a a wee bit larger figure-8 haun, leadin tae a tichter area o front sensitivity an a smawer lobe o rear sensitivity. It's produced bi combinin the twa components in a 3:1 ratio, makin nulls at 109.5°. This ratio maximises the directivity factor (or directivity index).[2][3]
- A super-cardioid microphone is seemilar tae a hyper-cardioid, except thare is mair front pickup an less rear pickup. It's produced wi aboot a 5:3 ratio, wi nulls at 126.9°. This ratio maximises the front-back ratio; the energy ratio atween front an rear radiation.[2][3]
- The sub-cardioid microphone haes nae null points. It's produced wi aboot 7:3 ratio wi 3–10 db level atween the front an back pickup.[4]
Three sic cardioid microphones/hydrophones cuid be orthogonally orientit as a collocated triad tae improve the gain an create a steerable beampattern.[5][6]
| Wikimedia Commons haes media relatit tae Microphone. |
References
eedit- ↑ Zimmer, Ben (29 Julie 2010). "How Should 'Microphone' be Abbreviated?". The New York Times. Retrieved 10 September 2010.
- ↑ a b Sena, E. De; Hacihabiboglu, H.; Cvetkovic, Z. (Januar 2012). "On the Design and Implementation of Higher Order Differential Microphones – IEEE Journals & Magazine". IEEE Transactions on Audio, Speech, and Language Processing (in Inglis). 20 (1): 162–174. doi:10.1109/TASL.2011.2159204. S2CID 206602089.
- ↑ a b Benesty, Jacob; Jingdong, Chen (23 October 2012). Study and Design of Differential Microphone Arrays (in Inglis). Springer Science & Business Media. ISBN 9783642337529.
- ↑ Dave Berners (December 2005). "Ask the Doctors: The Physics of Mid-Side (MS) Miking". Universal Audio WebZine. Universal Audio. Retrieved 30 Julie 2013.
- ↑ Wong, Kainam; Nnonyelu, Chibuzo; Wu, Yue (Februar 2018). "A Triad of Cardioid Sensors in Orthogonal Orientation and Spatial Collocation – Its Spatial-Matched-Filter-Type Beam-Pattern". IEEE Transactions on Signal Processing. 66 (4): 895–906. Bibcode:2018ITSP...66..895W. doi:10.1109/TSP.2017.2773419. S2CID 3298960. Retrieved 1 Februar 2021.
- ↑ Nnonyelu, Chibuzo; Wong, Kainam; Wu, Yue (Januar 2019). "Cardioid microphones/hydrophones in a collocated and orthogonal triad—A steerable beamformer with no beam-pointing error". The Journal of the Acoustical Society of America. 145 (1): 575–588. Bibcode:2019ASAJ..145..575N. doi:10.1121/1.5087697. PMID 30710946. S2CID 73422758. Archived frae the original on 6 November 2021. Retrieved 1 Februar 2021.